
In-Field Robotic Leaf Grasping and Automated Crop Spectroscopy
Masters of Science in Robotics, Carnegie Mellon University
Click here to view publication.
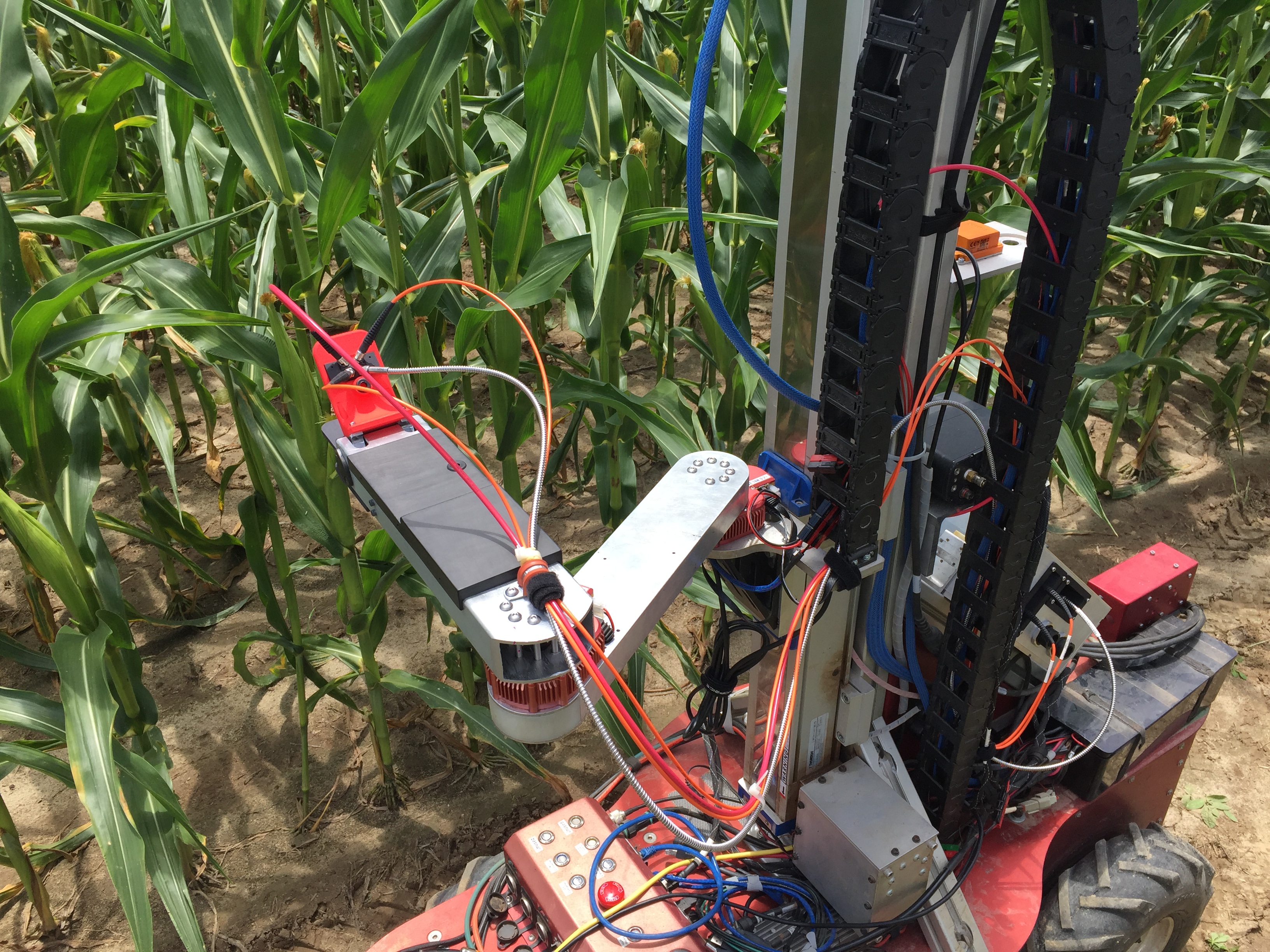
Abstract: Agricultural robotics is a growing field of intelligent automation that is proving to drastically increase the speed and reliability of in-field tasks such as precision seed planting, harvesting, field mapping, and crop monitoring. More specifically, plant breeders are beginning to use robotic systems to record the physical traits of crops throughout the growing season at a rate and resolution much higher than the slow and labor intensive manual methods commonly used. Therefore, robotic crop monitoring and automated data collection promise to greatly improve the breeding process by widening this plant phenotyping bottleneck. This thesis describes the development of a custom manipulator capable of grasping leaves for the application of contact-based sensors, as well as the relevant manipulation and computer vision algorithms used for in-field leaf grasping. Furthermore, it details the production of a broadband reflectance spectrometer to capture automated spectral reflectance measurements of leaves using this manipulator. These two systems are mounted to an agricultural, mobile robot platform, developed previously at Carnegie Mellon University, for field testing in sorghum bicolor breeding plots managed by Clemson University throughout South Carolina, USA.