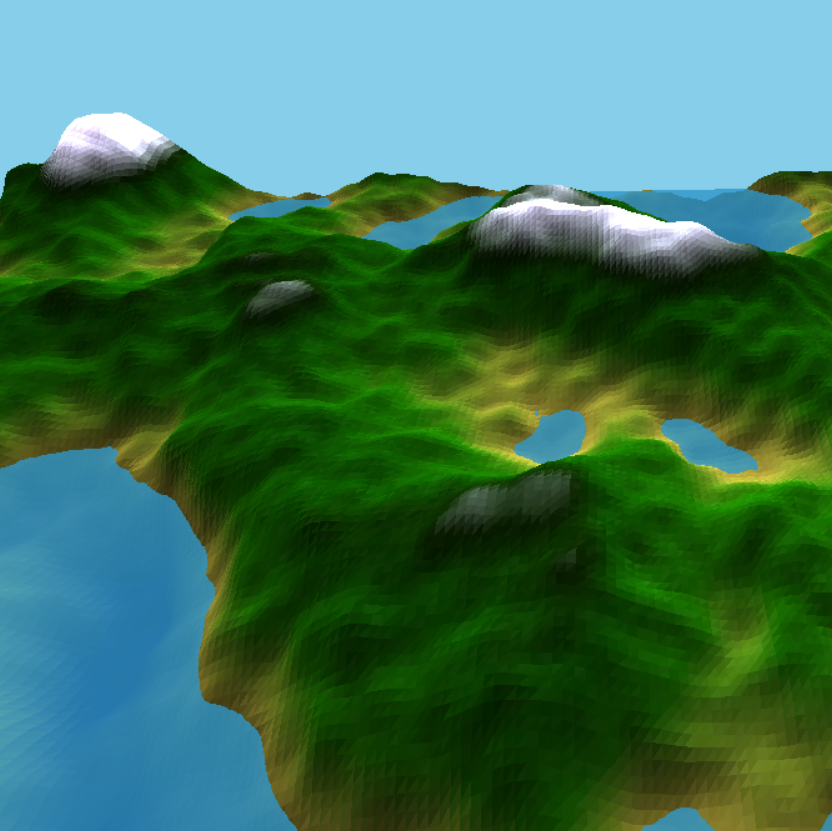
A Three.js experiment in dynamically re-rendering terrain as the camera moves throughout the universe.
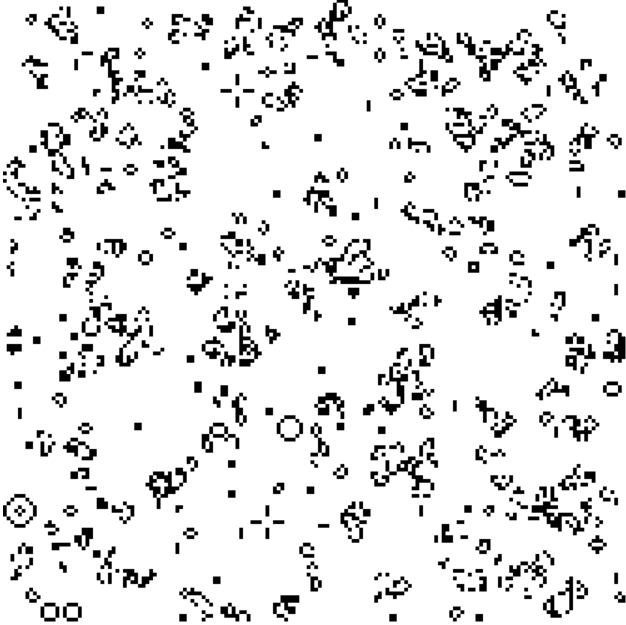
A fully configurable simulation of the Game of Life created using JavaScript and rendered using HTML5's canvas element.
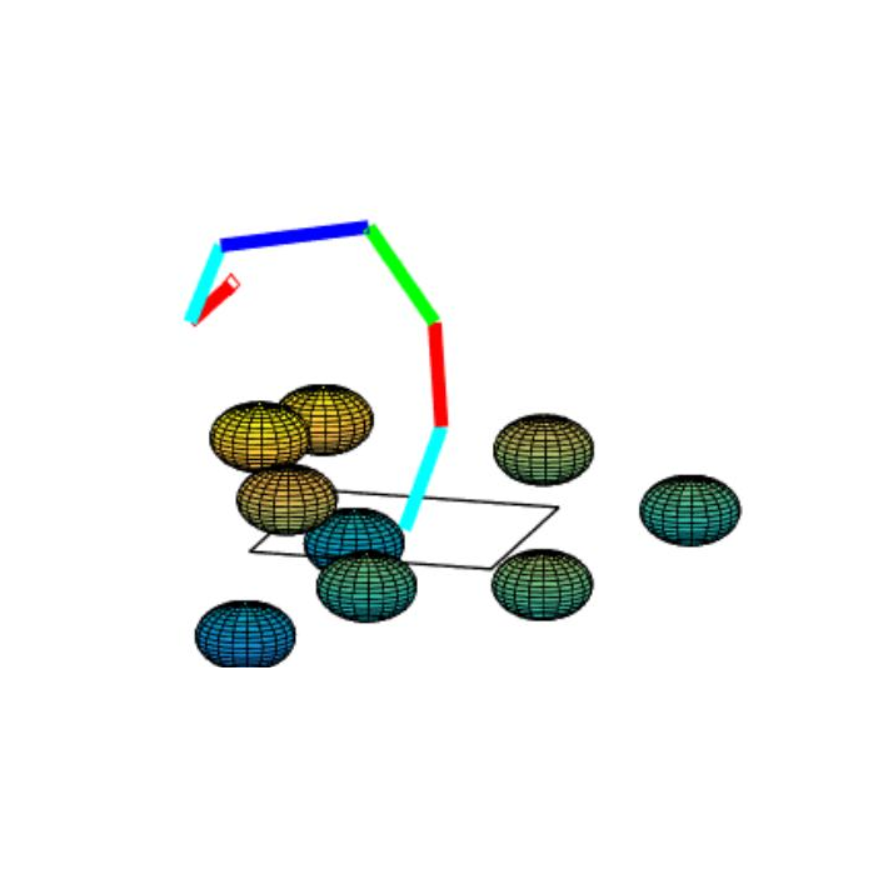
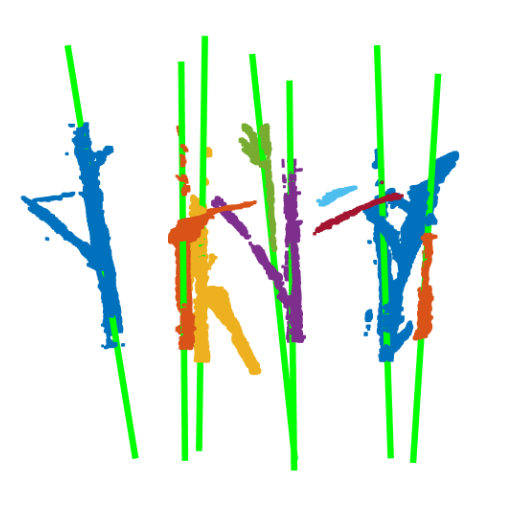
Through the use of function optimization in MATLAB, the pose of a 3D snake robot is controlled to avoid obstacles and grasp objects.
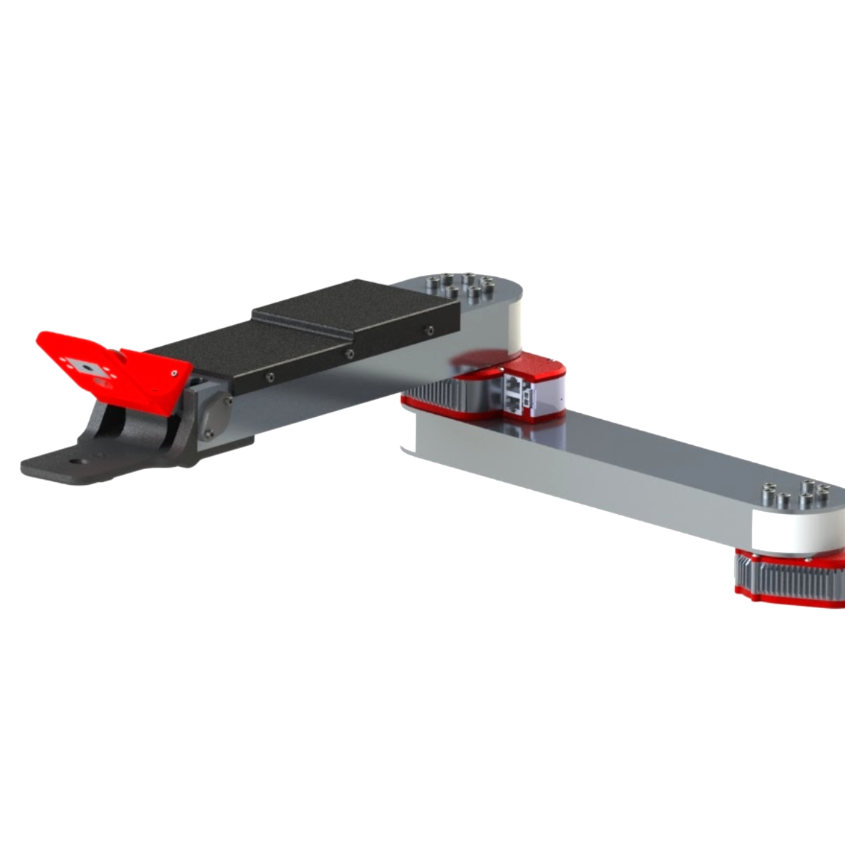
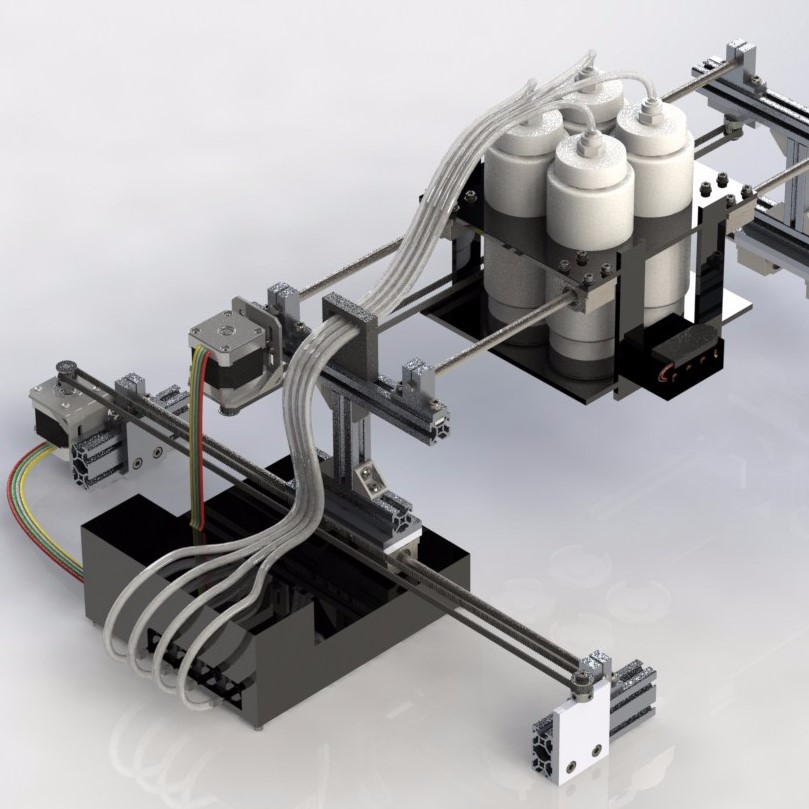
A custom manipulator capable of grasping crop leaves and applying a reflectance spectrometer to the leaf's surface to collect rapid, autonomous spectral reflectance scans.
A portable reflectance spectrometer system used to take rapid spectral measurements of the stalks and leaves of various crops.
A two-axis pancake printing system capable of creating multi-colored flapjacks in various shapes and designs.
A three-dimensional, wooden topographic map of Westeros that doubles as a Risk game board.
A sleek, adjustable headphone stand made from acrylic with a stylish and sturdy fin-shaped base.
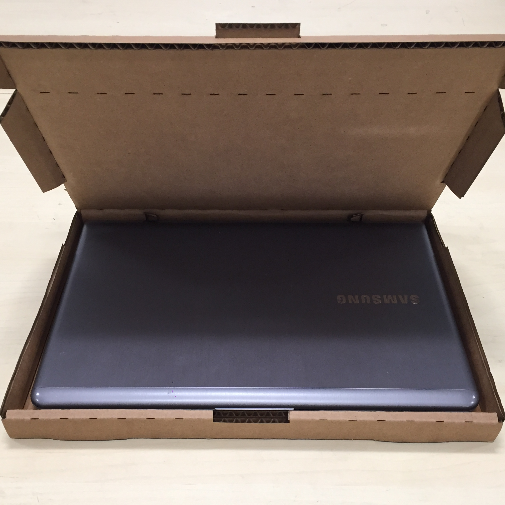
A unique, transforming laptop case that also functions as a stand for your personal computer.
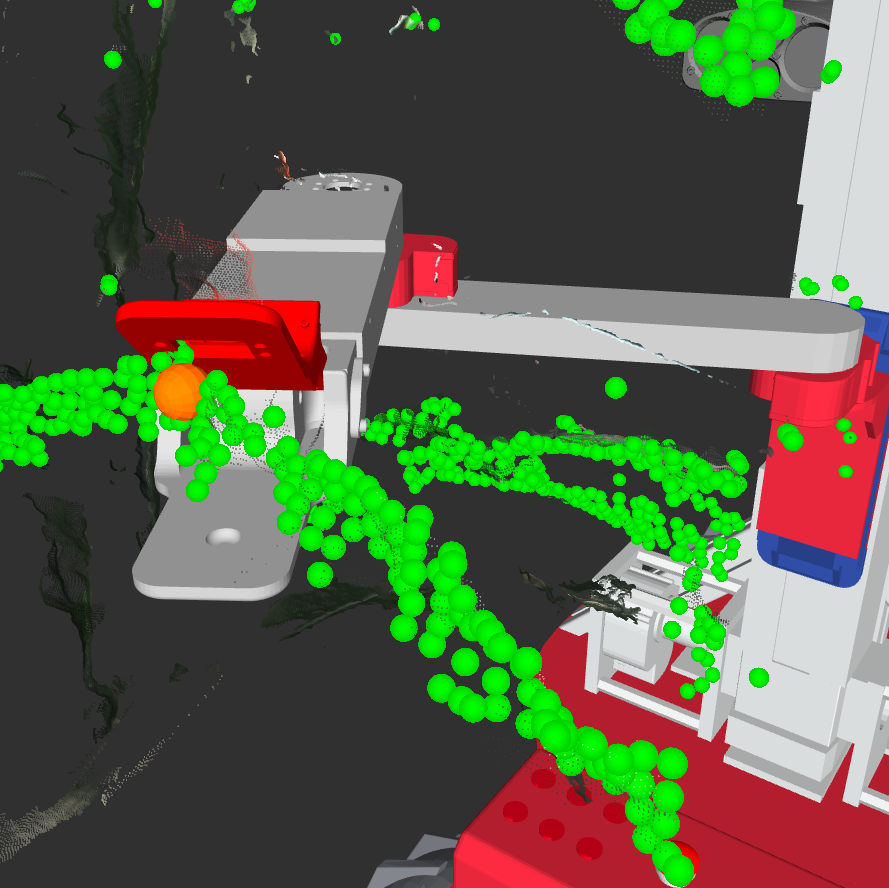
Title: In-Field Robotic Leaf Grasping and Automated Crop Spectroscopy
I developed a computer vision pipeline to quickly and reliably detect crop leaves in real-time from images taken by our group's mobile agricultural robot.
Using the kinematics of the manipulator and perceived 3D models of surrounding leaves, I have developed algorithms to find the optimal grasp pose for each leaf.