Title: In-Field Robotic Leaf Grasping and Automated Crop Spectroscopy
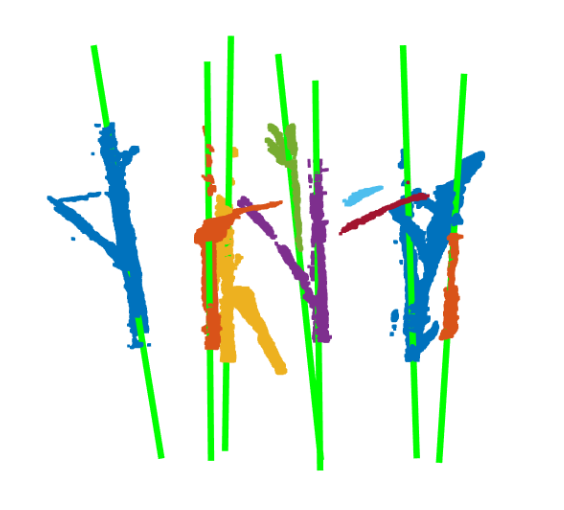
I developed a computer vision pipeline to quickly and reliably detect crop leaves in real-time from images taken by our group's mobile agricultural robot.
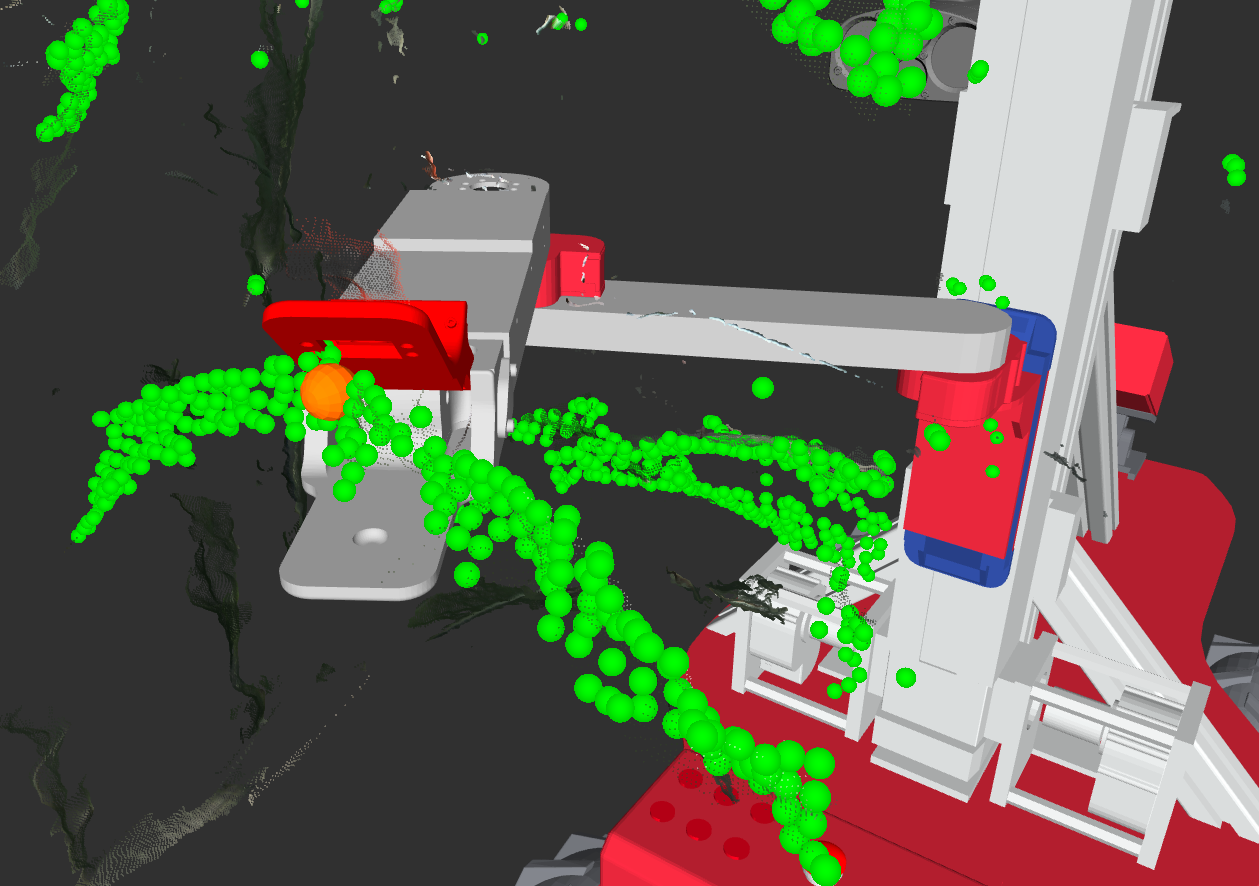
Using the kinematics of the manipulator and perceived 3D models of surrounding leaves, I have developed algorithms to find the optimal grasp pose for each leaf.